Gebrochene Satellit? Die nächste Generation Canadarm Willen zu beheben, was Sie schmerzt

Commander Chris Hadfield möglicherweise das neue Aushängeschild für die Canadian Space Agency, aber bevor der schnauzbärtige Ontarian die Szene schlagen, die Krone durch das äußerst vielseitige Canadarm Teleroboter System gehalten wurde. Jetzt nehmen eine neue Generation von Robo-Arme in den Himmel, wo sie als umkreisenden Satelliten Mechanik handeln werde.
Die RMS ist eine ferngesteuerte Roboter Manipulatorarm, ursprünglich konzipiert als ein Shuttle Remote Manipulator System zum Extrahieren von Elementen aus dem Space Shuttle Laderaum in der Umlaufbahn. Die nächste Generation von Canadarms, genannt "Nächste Generation APU" (NGC), werden im Auftrag der CSA von MacDonald, Dettwiler und Associates Ltd. (MDA) gebaut und umfasst vier Subsysteme.
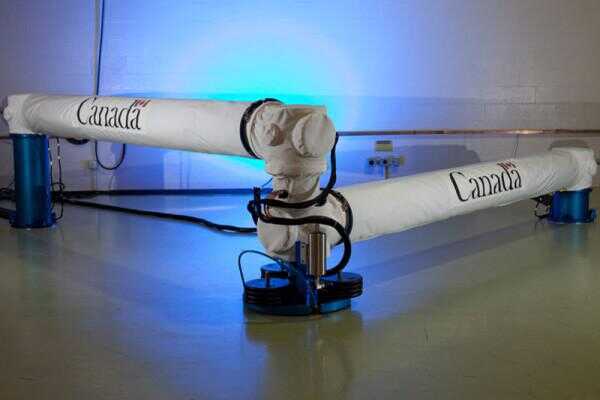
Die NGC hat eine 15 Meter-Arm ähnlich dem Canadarm-2 aber leichter und mehr kompatibel. Obwohl es sich um fast 50 Fuß und bietet sechs Freiheitsgrade Teleskop kann — beide praktisch für Weitergabe Satelliten zu erfassen – die 15 Meter Arm Falten bis auf nur 16 qm, etwa so groß wie ein Chevy Astro van, um in der aktuellen Generation von Raumfahrzeugen zu passen.
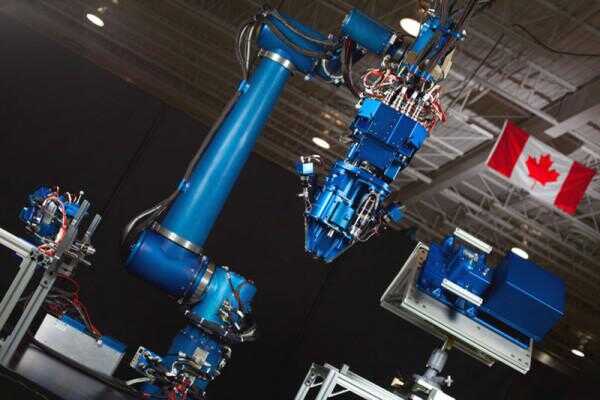
Das System beinhaltet auch einen kleinere 2,5 Meter-Arm mehr für Geschicklichkeit entwickelt (es ist aus der früheren Dextre-Arm-Design verwendet, an Bord der ISS gebaut) um Reparaturen am Satelliten tatsächlich durchzuführen, die für das Andocken der längere Arm erfasst. So ist es mit einer Reihe von Werkzeugen, imaging-Geräte und Graspers ausgestattet. Seine Aufgaben umfassen tot Komponenten ersetzen, Kraftstoff-Ventile zu manipulieren und Treibmittel von Service Handwerk auf den Client-Satelliten übertragen. Und wie sein Vorgänger, der 2,5 Meter-Arm kann mitfahren auf der längere Arm, zwischen verschiedenen Arbeitsstationen auf jeder Satellit zu bewegen.
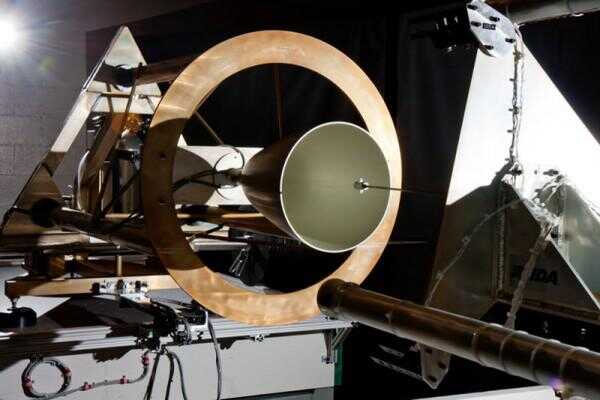
Und um sicherzustellen, dass die Betreiber mit den Systemen vertraut sind, bevor ihre läuten um Multi-Millionen-Dollar-Satelliten im eisigen Griff des Raumes, die NGC beinhaltet auch eine Simulation Testbed und teilautomatisierten Docking-Fähigkeiten. Der Prüfstand ermöglicht Flugingenieure, die vorgeschriebenen Mission Plan und Praxis erfassen und Docking-Verfahren unter realistischen Bedingungen (außer für die Schwerkraft) und Beleuchtung zu simulieren. Beihilfe bei der eigentlichen Docking-Verfahren ist das semi-auto-Docking-System. Sobald der Ziel Satelliten in Reichweite ist (nachdem es durch die 15 Meter-Arm packte worden ist) das Andocken Routine übernimmt und verbindet die beiden Sonden mit Sensoren, um die Nabelschnur zu führen, anstatt einen remote-Betreiber damit umgehen.
Benannt eine brennende Frage sind nicht aber, warum die Arme Terrance und Phillip? Es scheint eine offensichtliche Wahl. [ASC über IEEE Spectrum - alle Bilder: ASC]

Wird die nächste Generation von Displays 3D sein?

Die nächste Generation von SD-Karten garantieren 4 K Video-Aufnahmen

Die nächste Generation von jungen – und schlechte – Prominente Vorbilder

Die nächste Generation Patlabor: Tokyo Krieg Beitrag – jenseits uncanny valley

Die nächste Generation von Android Wear Smartwatch ist hier

Im Inneren des Bootcamps, wo YouTube die nächste Generation von Sternen wächst

Stehen Sie für die nächste Generation der Finanzberatung... von einem Roboter

Die nächste Generation von Ingenieurinnen zu erfüllen

Bergsteiger brachen in vierte höchste Gebäude der Welt, und was sie Säge ist Nuts

Die 7 Arten von Halloween Kostüm und was sie über Sie sagen

Die Tories sind keine Opposition frei zu tun was sie wollen
Die ultimative versuchen-zu-bekommen-schwanger-Diät: Was Sie kaufen und wie Essen

YouTube wendet sich an die menschliche Note, wie es die nächste Generation von Sternen pflegt
