Dieser Roboter werden Ihr Leben retten, bei Katastrophen

SAR Operationen sind zarte, zeitkritische und intensiv. Thats, warum Forscher sind immer auf der Suche nach neuen Wegen, um die schmutzige Arbeit auf Roboter zu entladen: Maschinen, die Retter hilft bekommen die an der Unterseite der Trümmer — oder die Spitze des Berges – schneller und wesentlich effizienter.
Letzte Woche auf der SSRR Konferenz in Schweden beschrieben Forscher aus der ganzen Welt die neuesten Konzepte in "Rescue Robotics", einschließlich alles von computational Theory auf bestimmte Hardware Vorschläge. In einigen Fällen erklärte Forscher auf größere, angewandte Visionen für die zukünftige Forschung.
Hier sind nur ein paar Katastrophenszenarien und wie Roboter helfen könnte Ihr Keister aus ihnen heraus lebendig erhalten.
Sie sind in einer Lawine begraben.
Die Herausforderung
Wenn Sie durch einen Berg von Schnee begraben sind, Retter haben 15 Minuten Zeit, Sie heraus zu graben, bevor du stirbst Erstickungsgefahr – Unterkühlung nicht einmal Zeit haben, um inmitten. In dieser Zeit sie haben Opfer in einem Bereich zu suchen, die die Größe von 100 Fußballfeldern im Durchschnitt, und tückischen, instabilen Gelände zu navigieren, ohne dabei selbst ums Leben. Methoden für die Verfolgung von Lawine Leuchtfeuer und Handys bereits bestehen, aber Retter müssen sich schneller bewegen können.
Der Vorschlag
Seit Beginn dieses Jahres, die SHERPA-Projekt ist Gemeinschaftsarbeit zwischen sieben Universitäten, die versuchen, eine "Roboter"Plattform"zu entwickeln um Retter in alpinen Suche und Rettung zu helfen. Die "Plattform" ist im Grunde ein aufeinander abgestimmtes System, das verschiedene Arten von Bots verwendet.
Wie es funktioniert
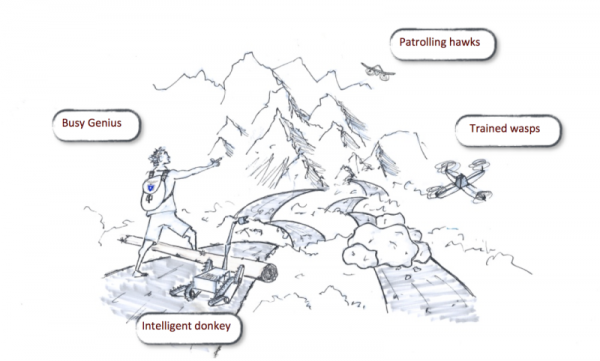
Die SHERPA-Plattform (PDF) beschreibt verschiedene Rollen für ein Team von Robotern, zusammen mit menschlichen Retter, eine Lawine zu beurteilen und mögliche Überlebende so schnell wie möglich finden. Wir sterbliche Menschen werden einfach als "belebten Genies" kategorisiert – die Gehirne —, die denken und handeln sehr wirksam, aber in der Regel wird durch spezielle Rettung Aufgaben abgelenkt werden, während die Maschinen autonom ihre Rollen dienen. Diese haben natürlich ihre eigenen Spaß Namen:
- Die patrouillierenden Hawk: ein Höhen-Fahrzeug, wie ein Hubschrauber, das über die übergreifende Unterstützung für die Rettung Szene schwebt. Die Hawks sind ausgestattet mit einem LIDAR-Sensor für die schnelle Zuordnung des Bereichs Rettung und dienen auch als ein Verkehrsknotenpunkt.
- Trained Wespe: ein kleines UAV-Typ-Fahrzeug, das schnell von Ort zu Ort bewegen kann, Interessensgebiete genauer untersuchen, als auch Löcher in die Höhenlage Karte zu erkunden. Die Wespen sind mit leichten Laserscanner, für das Terrain Mapping ausgestattet.
- Intelligente Esel: eine Boden-Rover mit einem Multi-Funktions-Roboterarm. Es ist leicht, so dass sie in einer Box auf der Rückseite des menschlichen Retters durchgeführt werden kann. Der Esel dient als eine lokale Kommunikations-Drehscheibe sowie eine Ladestation für die Wespen.
Die SHERPA-Plattform ist speziell für den Einsatz im bergigen Hinterland, aber Forscher denken, daß der Gesamtmethodik auf breitere Szenarien angewendet werden kann. Der Plan ist hardwarespezifisch Roboter Rollen bauen sowie AI für die Bots autonome Aufgaben zu entwickeln.
Sie sind von einer Flut gestrandet.

Die Herausforderung
Du hast große Überschwemmungsgebiete und kritische Versorgung der Opfer weit verbreitet in der Zielregion zu verbreiten. Ein einfache Luft-Tropfen nicht.
Der Vorschlag
Ein Team an der Carnegie Mellon University arbeitet an der kooperative Roboter Wasserfahrzeuge, eine kostengünstige Luftkissenboot, die bereitgestellt werden können, in kleinen Zügen, die gemeinsame Aufgabe von entdecken und was ist im Gange, sowie die kritische Versorgung isoliert Opfer zu dienen.
Wie es funktioniert
Eine Armee von billig, einfach zu montierenden Lüfter Boote wird lose auf einer überfluteten Region festgelegt, Vermessung Umweltbedingungen und Hilfe leisten. Bisher haben Forscher entwickelt (PDF) mehrere Modelle Modell für ein Kunststoff Boot, das von einem großen Fan angetrieben wird und an das äußere Wort mit einem kommerziellen Smartphone, die GPS-Koordinaten und Daten aus keine on-Board-Sensoren Relais angeschlossen. Das Telefon verbindet sich mit alles über eine einfache Oberfläche Arduino.
Die Aktienprogramm fordert Boote, die 2 x 1 Fuß groß sind, aber können sie skalieren – unter den Projekten, wird z. B. ein 9,5-Fuß-Ozean-Ready-Boot mit einem Massenspektrometer, die einfache Modulbauweise zwischen $800-$1, 200 kostet, geladen. Abbildung in sechs Stunden der Arbeit und Sie sind auf der Suche zu einem Preis von $2.000.

Wie viele Boote benötigen Sie? Laut Professor Paul Scerri, über eine für jeden vier Hektar. Er weist darauf hin, die Größe der Flotte ist jedoch nur von untergeordneter Bedeutung.
"Unser Argument jedoch gehört, dass wir nicht denken, dies ist ein interessanter Punkt," schreibt er. "Roboter werden so billig, dass menschlicher Zeit das weitaus wichtigste ist so verrückt mit der Anzahl der Boote – wir denken nicht, dieses Mal ist weit weg."
Natürlich, Sie nicht einfach ein Boot aus ins Wasser schieben und hoffe alles klappt wie geplant – also auch entwickelten die Forscher haben Systeme, mit denen die Boote tun alles von Ausweichen vor Hindernissen im seichten Wasser, Probenahme Wasserqualität.
Die Boote wurden Hunderte Stunden (PDF) im Wasser getestet, und das Team hinter der Forschung hat es in ein Startup namens Platypus, die Yacht komplett Kits für $3.000 pro Pop verkauft ausgegliedert.
Nach Scerri erstrecken sich die Anwendungen weit über bloße Katastrophenhilfe. Anfang 2014 werden die Carnegie Mellon Mannschaft nach Kenia Reisen, mit einer Flotte von Booten, Karte Hippo Pools zu helfen. "Es ist ein tolles Roboter-Projekt, weil es so gefährlich für den Menschen ist."
Sie sind gefangen in einem eingestürzten Gebäude
Die Herausforderung
Nur weil ein Gebäude zusammengebrochen ist, bedeutet das nicht, dass jeder innen tot ist. Retter mit wenig Zeit und Ressourcen benötigen eine schnellere Methode, finden ihren Weg in Schutt und Asche, so dass sie die Überlebenden herausziehen können.
Der Vorschlag
Mit UAVs mit RGB-D-Kameras ausgestattet – Farbe und Tiefe Kameras wie die Datei in eine Kinect-Forscher an der Ryerson University entwickelten ein System zur Identifizierung von potenziellen Zugang Löcher in weiten Teilen von Schutt.
Wie es funktioniert
In einer Proof-of-Concept-Demonstration, verwendet Microsoft Kinect Sensor an ein UAV geschnallt, um Löcher zu finden – mögliche Zugänge — in Bergen von Schutt. Das System analysiert die Kamera Twin 640 x 480 Bilder – man zeigt Farbe, eine Tiefe – und identifiziert Kandidaten Löcher für Rettungskräfte zu untersuchen. Potenziellen Zugang Portale werden basierend auf einer Reihe von Kriterien, darunter tiefe Unterschiede mit der Pixel-Umgebung, die Größe und die relative Helligkeit gewertet.
Bisher wurde das Konzept auf Drohnen über Übungsplätze für Urban Search & Rescue Teams getestet. Der nächste Schritt ist, die verschiedenen Kriterien wird verwendet, um identifizieren potenzielle Eingänge, sowie um die Verarbeitung der Daten zu verbessern, so dass es in Echtzeit getan werden kann wie eine Drohne über eine Szene fliegt zu erweitern.
Eröffnung Bild mit freundlicher Genehmigung US Library of Congress.

Mit Ihrer Pisse riechen, könnte dieser Hund tatsächlich Ihr Leben retten.

8 Wege eine glückliche Ehe wird Ihr Leben retten.

Wie Verständnis Wahrscheinlichkeit könnte Ihr Leben retten.

Wie Dentalhygienikerinnen könnte Ihr Leben retten.

Ihre heikelsten Freunde können Ihr Leben retten.
Sie ihre Handgelenke In Klebeband - was sie als nächstes Ihr Leben retten könnten gebunden

Diese 15 Tipps, Selbstverteidigung tatsächlich Ihr Leben retten könnten eines Tages
Was dieses kleine Mädchen In der Hand hält, könnte ihr Leben retten

Diese Drohne könnte tatsächlich Ihr Leben retten.

6 mind-blowing Möglichkeiten Gentechnik könnte Ihr Leben retten.

5 erschreckend Tiere, die eines Tages Ihr Leben retten kann

9 Kreaturen, die Ihr Leben retten kann

Alkohol und Kinder: 13 Fakten, die ihr Leben retten könnte
