Unterwasser-Roboter angetrieben durch unterschiedliche Wassertemperaturen
NASA, US Navy und Universität Forscher haben erfolgreich
demonstriert das erste Unterwasser Roboterfahrzeug vollständig mit Strom versorgt werden
durch die natürlichen Temperaturunterschiede gefunden in unterschiedlichen Tiefen der
Ozean.
Die neue Technologie, gefunden auf einem Unterwasser-Roboter namens die klingenden
Ozeanographische Lagrangrian Beobachter thermische aufladen (SOLO-TREC), ist
skalierbar für den Einsatz auf den meisten anderen ozeanographische Roboterfahrzeuge, NASA
sagte.
Die Energie-ernten-Technologie könnte in eine neue Generation von einläuten.
autonome Unterwasserfahrzeuge in der Lage, praktisch
unbegrenzten Ozean monitoring für Klima und marine tierexperimentellen Studien,
Erforschung und Überwachung.
Die Leistung von Unterwasserfahrzeugen Roboter hat traditionell
durch macht Überlegungen begrenzt worden. SOLO-TREC, mit seinen Roman thermische
Aufladen von Motor, könnte einen Weg, um dieses Problem bieten.
"Menschen haben lange geträumt einer Maschine, die mehr Energie als produziert
Es verbraucht und läuft auf unbestimmte Zeit,"Jack Jones, ein NASA Jet Propulsion
Principal Engineer Laboratory (JPL) in Pasadena, Kalifornien und SOLO-TREC
Co-Principal Investigator, sagte in einer Erklärung.
"Zwar kein wahre Perpetuum Mobile, da wir eigentlich
verbrauchen Sie einige ökologische Energie, der Prototyp des Systems belegen
JPL und seine Partner können kontinuierlich überwachen den Ozean ohne eine
Begrenzung auf seine Lebenszeit verhängten Energieversorgung,", sagte Jones.
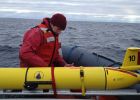
183-Pfund (84 Kilogramm) SOLO-TREC Prototyp wurde getestet und
bereitgestellt von einem gemeinsamen JPL und Scripps Institution of Oceanography,
University of California in San Diego Team am 30. November 2009, ca. 100
Meilen (161 Kilometer) südwestlich von Honolulu, Hawaii. Den Dreimonats-Libor
Test eingehüllt, letzten Monat.
Energie aus dem salzigen, warmen und kalten
SOLO-TREC stützt sich auf den Ozean Wärmeenergie als es abwechselnd
Begegnungen warme Oberflächenwasser und kälter
Bedingungen in der Tiefe.
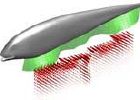
Schlüssel zu seiner Bedienung ist die sorgfältig ausgewählten wachsartigen Substanzen bekannt
als Phase-Change-Materialien, die in 10 externe Rohre befinden.
Da der Roboter taucht auf und warme Temperaturen, das Material stößt
schmilzt und erweitert; Wenn es taucht und tritt in kühleren Gewässern, die
Material erstarrt und Verträge. Der Ausbau des Wachses unter Druck setzt
Öl im Inneren des Schwimmers gelagert.
Dieses Öl fährt in regelmäßigen Abständen einen Hydraulikmotor, der erzeugt
Strom und lädt die Fahrzeugbatterien. Energie aus der
wiederaufladbare Batterien versorgt der Schwimmer Hydrauliksystem, die
ändert sich der Schwimmer Volumen (und damit Auftrieb), so dass es zu bewegen
vertikal.
Die wässrige Straße
SOLO-TREC hat bisher mehr als 300 Tauchgänge vom Ozean abgeschlossen.
Oberfläche bis zu einer Tiefe von 1.640 Fuß (500 Meter). Seine thermische aufladen
-Motor produziert etwa 1,7 Wattstunden Energie pro Tauchgang, genug
Strom des Fahrzeugs wissenschaftliche Instrumente, GPS-Empfänger betreiben,
Kommunikation Gerät und Tarierung Pumpe.
SOLO-TREC ist jetzt in einer erweiterten Mission als das JPL-Scripps Team plant
autonomes Unterwasserfahrzeug für viele Monate, wenn Betrieb
nicht erst nach Jahren.
NASA und der US Navy wollen uns auch dieses thermische aufladen bewerben
Technologie zur nächsten
Tauchpumpe Fahrzeuggeneration.
"Die meisten der Erde ist bedeckt vom Ozean, doch wir wissen weniger über den Ozean
als wir über die Oberfläche einiger Planeten zu tun,"sagte Yi Chao, ein JPL
leitender Wissenschaftler und SOLO-TREC principal Investigator.
"Diese Technologie Energie aus dem Meer zu ernten haben riesige
Auswirkungen auf wie wir messen und überwachen der Ozean und seine
Einfluss auf das Klima."
- Neu
"Unterwasser-Flugzeug" Tiefen des Ozeans zu erkunden - Wie
das Internet überquert den Ozean - Coolste
Fahrzeuge erhalten Sie nie an Fahrt

Fotos: Unterwasser-Roboter helfen WWII Flugzeugwracks wiederherstellen

Unterwasser-Roboter könnte erschnüffeln geschmuggelten Drogen, Waffen
Elektrische Fische könnte als Modell für Unterwasser Roboter dienen.

Produktrückrufe hit Allzeithoch angetrieben durch Auto und Lebensmittel-Skandale
Unterwasser-Roboter hören 9 bedrohte Wale

Unterwasser-Roboter, eisbedeckten Südpolarmeer zu erkunden

Heads-Up, Pinguine! Schiff setzt Unterwasser-Roboter

Unglaubliche Video: Neugierig Wal inspiziert Unterwasser-Roboter

Unterwasser-Roboter läuft auf des Meeres Wärme

Käfer klebrigen Füße legen Grundstein für Unterwasser-Roboter
Insekt Sprünge angetrieben durch mechanische "Zahnräder"

NEEMO 7: NASA Unterwasser Roboter Telemedizin Experiment

Neunaugen könnte den Schlüssel zum Unterwasser Roboter besser halten.
