Meeräsche auf: Wie kann Robotik einem Wriggle mit fischig Fortbewegung (Op-Ed) erhalten

Ein Schmerz im bass
Im Prinzip könnte die Glas-Knifefish eine einfache Fortbewegung Strategie der Bewegung seine Flosse in eine Richtung oder ein anderes annehmen. Für einige zusätzliche energetische Kosten nimmt die Fische jedoch stattdessen eine Strategie, die stützt sich auf gegenseitig Gegenkräfte, mit Feedback-Kontrolle gegen propagierende Wellen zu stabilisieren.
Diese Wellen bieten zwei wesentliche Vorteile gegenüber einfacher Strategien:
- Sie lehnen passiv Störungen (was zu mehr passive Stabilität)
- Sie benötigen deutlich weniger Steuerungsaufwand (erhöhte Wendigkeit).
Diese Beseitigung von den Kompromiss zwischen Wendigkeit und Stabilität, bei Messungen der Knifefish entdeckt wurde später bestätigt mit Rechenmodelle und experimentieren mit biomimetische Roboter (siehe obige Abbildung).
Neben der Herausforderung der Wendigkeit-Stabilität-Dichotomie in biologischen Fortbewegung, fordert diese Forschung den gleichen Kompromiss innerhalb der Entwicklung von mobilen Robotern.
Hinweise darauf, dass das sehr Design der tierischer Morphologie erleichtert Kontrolle, wodurch die Anzahl der physikalischen Parameter, die durch das Nervensystem verwaltet werden müssen. Mit weiterer Forschung und Modellierung von wie Tiere sich gegenseitig entgegensetzenden Kräfte nutzen erfordern zukünftige Generationen von Robotern gleichwertig deutlich weniger Parameter zu kontrollieren.
Diese Reduzierung der Dimensionalität würde die Lenkbarkeit des Tunings dieser Parameter auf ihre optimale Werte, wodurch weitere Verbesserungen in der Leistung der Roboter Fortbewegung verbessern.
Fin.
David Budden funktioniert nicht für, zu konsultieren, eigene Anteile an oder von einem Unternehmen oder einer Organisation, würde profitieren von diesem Artikel, und hat keine relevanten Zugehörigkeiten, finanziert.
Dieser Artikel erschien ursprünglich in The Conversation. Lesen Sie die

Meeräsche biblischen Ausmaßes

Hank es Haar: Evolution und die Beendigung der Meeräsche (Fotos)

Wie eine feministische Anthologie mich gelehrt, dass Außenstehende kann an einem Strang ziehen

Wie kann ein Schnellkochtopf auf Ihren Valentinstag Abendessen einheizen
Paradoxon gelöst? Wie kann Informationen von einem schwarzen Loch zu entkommen

Daniel Radcliffe auf Lohngefälle zwischen den Geschlechtern des Films: "Wie kann dies noch geschehen?"

Studie zeigt, dass Eltern sind so unglücklich nach Baby #1, wie sie nach einem Todesfall sind

Wäsche-Tipps: Wie Sie Ihre Kleidung ganz neu zu halten

Wie kann eine "Faire" Ehe Ihr Liebesleben verletzen

Südkorea-Fähre: Wie kann ein riesiges Schiff versenken?
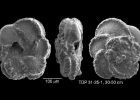
Wie kann man... Ableiten antike Klimazonen von mikroskopisch kleinen fossilen Muscheln?

Meer Plankton auf Raumstation? Russischer Beamter behauptet, dass es So ist

Wie kann Ihren griechischen Sommerurlaub Griechenland retten
